Erkundung - Drohnenshow
Eine Lichtshow mit Dohnen
Spektakuläre Lichtshows werden zunehmend mit Hilfe von Drohnen durchgeführt.

Im Videobeitrag Drohnenshow zum Tag der Deutschen Einheit 2021 (nach ca. 10 min) kannst du einige Showeinlagen sehen. Im Videobeitrag Sternenbilder beim Altstadtfest Frankfurt wird zudem kurz erläutert, wie solche Shows gemacht werden: Jede Drohne wird mit einem Computerprogramm gesteuert. Hierzu muss das Programm die genauen Positionen der Drohnen verwalten und neu berechnen.
Wir werden hier eine Drohnenshow selbst entwickeln. Natürlich nicht so kompliziert wie die Profis das machen!
Der Weg ins Unendliche
Unsere Lichtshow soll den Weg ins Unendliche mit Hilfe vieler Drohnen verdeutlichen. Die Drohnen sollen hierbei eine Lichterkette bilden, wobei die einzelnen Drohnen in gleichem Abstand auf einer (gedachten) Geraden positioniert sind.
Zum Herunterladen: drohnen1.ggb
Ziel ist es, die Positionen der Drohnen genau zu bestimmen.
Aufgabe 1
Die Koordinaten der beiden Drohnen $D_0$ und $D_1$ werden vorgegeben: $D_0(2|-2|2)$ und $D_1(1.5|-1|2.5)$.
Aus diesen beiden Angaben lassen sich die Koordinaten aller anderen Drohnen bestimmen.
Entwickle (möglichst eigenständig) ein Verfahren, mit dem man die Koordinaten aller Drohnen berechnen kann. Führe die Berechnungen auch aus. Nutze gegebenenfalls die folgenden Hilfestellungen.
Berechne den Vektor $\vec{u} = \overrightarrow{ D_0 D_1 }$.
Bestimme $\overrightarrow{ O D_2 }$ mit Hilfe von $\overrightarrow{ O D_0 }$ und $\vec{u} =\overrightarrow{ D_0 D_1 }$.
Gehe analog bei den anderen Punkten vor, z.B.: $\overrightarrow{ O D_3 } = \overrightarrow{ O D_0 } + 3 \cdot \vec{u}$.
Aufgabe 2
V. behauptet, dass $D_{10}$ die Koordinaten $D_{10}(-3|8|15)$ hat. Überprüfe, ob diese Behauptung stimmt. Schreibe eine Antwort an V.
Aufgabe 3
Entwickle eine Formel zur Berechnung des Vektors $\overrightarrow{ O D_n }$ aus $\overrightarrow{ O D_0 }$ und $\vec{u} =\overrightarrow{ D_0 D_1 }$.
$\overrightarrow{ O D_n } = ...$
Aufgabe 4
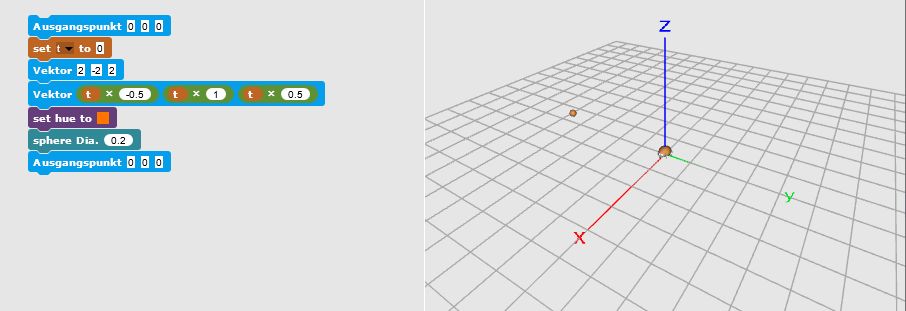
Auf der Seite beetleblocks.com findest du eine Programmierumgebung, mit der man u.a. die Bewegung eines Käfers im 3D-Raum steuern kann.
Importiere die Datei drohnen1.xml. Mit den Blöcken [Vektor] und [Ausgangspunkt] kannst du die Bewegung eines (fliegenden) Käfers festlegen. Vorgegeben ist hier ein Programm, mit dem der Käfer eine Drohne im Raum positionieren kann. Analysiere das Programm und erkläre, wie es funktioniert. Benutze das Programm, um die Drohnenkette zu erzeugen. Verändere hierzu den Wert des Parameters $t$.
Experimentiere mit dem Programm. Ändere hierzu die vorgebenen Zahlenwerte im Programm ab. Beschreibe und erkläre, wie sich die Änderungen auswirken.
Vektorielle Beschreibung der Drohnengerade
Wir betrachten jetzt die Gerade etwas genauer, auf der alle Drohnen positioniert sind.
Zum Herunterladen: drohnen2.ggb
Aufgabe 5
Mit $\vec{p} = \overrightarrow{ O D_0 }$ und $\vec{u} =\overrightarrow{ D_0 D_1 }$ sowie $\vec{x} = \overrightarrow{ O X }$ kann man folgende Vektorgleichung aufstellen:
g: $\vec{x} = \vec{p} + t \cdot \vec{u} = \left(\begin{array}{c} 2 \\ -2 \\ 2 \end{array}\right) + t \cdot \left(\begin{array}{c} -0.5 \\ 1 \\ 0.5 \end{array}\right)$ (mit $t \in \mathbb{R}$)
(a) Welche Werte für $t$ ergeben die Drohnenpositionen? Erläutere kurz.
(a) Für $t$ kann man mit dem Schieberegler weitere Zahlen einstellen. Erläutere, wie man die entsprechenden Positionen auf der Geraden erhält.
Quellen
- [1]: Lichtshow mit Drohnen - Urheber: Preetam.choudhury - Lizenz: Creative Commons BY-SA 4.0
