Vertiefung – Konstruktion orthogonaler Vektoren
Zielsetzung
Du kannst bereits überprüfen, ob zwei Vektoren orthogonal zueinander sind. Auf dieser Seite wird das Problem umgedreht: Ein Vektor $\vec{v}$ ist vorgegeben und es soll ein weiterer Vektor gefunden werden, der orthogonal zu $\vec{v}$ steht.
Ein Rechteck konstruieren
Eine Seite eines Rechtecks ist mit den Punkten $A(-3|1)$ und $B(3|3)$ bereits vorgegeben. Diese Seite soll zu einem Rechteck $ABCD$ ergänzt werden.
Aufgabe 1 (Einstieg)
(a) Finde einen möglichen Punkt D durch Ausprobieren.
(b) Wie kann man einen geeigneten Punkt finden, wenn man kein Applet zur Verfügung hat? Beschreibe, wie man vorgehen kann.
Zum Herunterladen: skalarprodukt3.ggb
Aufgabe 2 (Erarbeitung)
(a) Vereinfache die Orthogonalitätsbedingung so weit wie möglich..
(b) Bestimme mögliche Lösungen dieser Gleichung in der Form $(v_1; v_2) = (...; ...)$.
(c) Begründe (geometrisch und rechnerisch): Es gibt unendlich viele Vektoren, die die Orthogonalitätsbedingung erfüllen.
(d) Bestimme für ein mögliches Rechteck die Koordinaten der Punkte $C$ und $D$. Dokumentiere die Überlegungen und Rechnungen.
Aufgabe 3 (Sicherung)
✏️️ Notiere dir ein Beispiel, wie man im Zweidimensionalen einen orthogonalen Vektor konstruiert:
Orthogonale Vektoren konstruieren
Zu einem gegebenen Vektor $\vec{u}$ findet man unendlich viele orthogonale Vektoren $\vec{v}$. Dazu geht man so vor ...
Aufgabe 4 (Vertiefung)
(a) Q. behauptet: Wenn ich zum Vektor $\vec{u} =\left(\begin{array}{c} 6 \\ 2 \end{array}\right)$ den Vektor $\vec{v} =\left(\begin{array}{c} -2 \\ 6 \end{array}\right)$ wähle, erhalte ich sogar ein Quadrat. Stimmt das? Untersuche und Begründe.
(b) Erläutere auch die Strategie, die Q. hier benutzt hat, um ganz schnell zum Vektor $\vec{v}$ zu gelangen.
Eine Orthotour konstruieren
Ein Käfer soll eine Orthotour fliegen. Eine Orthotour soll eine Tour sein, bei der der Käfer immer einen Teilweg geradeaus fliegt und dann die Richtung so abändert, dass der nächste Teilweg orthogonal zum vorherigen Teilweg ist.
Aufgabe 5 (Erarbeitung)
Konstruiere alleine oder mit einem Partner schrittweise eine Orthotour:
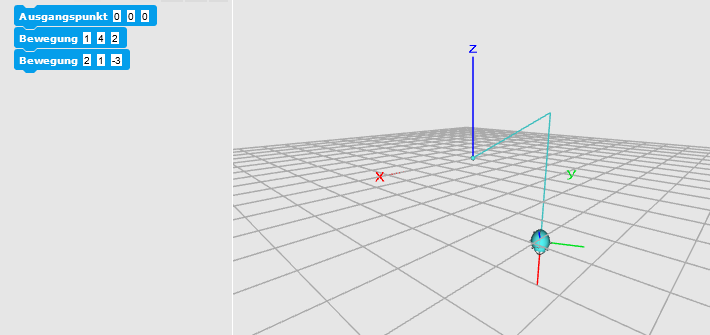
Die Tour soll am Ursprung $(0|0|0)$ starten. Beginnt dann z.B. mit dem Vektor $\vec{u} =\left(\begin{array}{c} 1 \\ 4 \\ 2 \end{array}\right)$. Findet einen dazu orthogonalen Vektor und so weiter.
Zur Kontrolle könnt ihr das folgende Applet verwenden.
Zum Herunterladen: drohne3d.ggb
Anleitung für das Applet
Drücke auf den Button „Drohne startklar machen“. Jetzt kannst du die Bewegungsdaten (rot, oben links) verändern. Drücke nun auf „Drohne fliegen lassen“; die Drohne fliegt zum neuen Punkt $P'$. Drücke nun auf „Neue Drohnenposition anzeigen“ und in der Grafik oben werden die Koordinaten von $P'$ angezeigt.
Nun kannst du erneut auf „Drohne startklar machen“ klicken. Danach ist $P$ auf der Position des vorherigen $P'$ und du kannst die Drohne von hier aus weiter steuern.
Aufgabe 6 (Sicherung)
✏️️ Notiere dir eines der Beispiele der vorherigen Aufgabe als Beispiel dafür, wie man orthogonale Vektoren im dreidimensionalen Raum konstruiert.
Einen Quader konstruieren
Ein Quader ist ein 3D-Körper, dessen Seitenflächen alle rechteckig sind. Kanten, die an den Ecken zusammenstoßen, müssen also jeweils orthogonal zueinander sein.
Es ist gar nicht so einfach, einen Quader im Raum zu konstruieren. Durch Probieren kommt man hier nicht so einfach zu Ergebnissen. Ziel ist es, ein Verfahren für die Quaderkonstruktion mit Hilfe von Vektorgeometrie zu entwickeln. Dazu soll der Quader von einem Punkt $P$ im 3D-Raum mit drei Vektoren $\vec{u}$, $\vec{v}$ und $\vec{w}$ aufgespannt werden.
Das Applet zeigt einen ersten Versuch. Offensichtlich ist hier kein Quader entstanden.
Zum Herunterladen: quader3.ggb
Aufgabe 7 (Vertiefung)
(a) Behalte die Koordinaten von $\vec{u}$ bei. Verändere in einem ersten Schritt die Koordinaten von $\vec{v}$ so, dass die beiden Vektoren $\vec{u}$ und $\vec{v}$ orthogonal zueinander sind. Stelle hierzu erst einmal eine Orthogonalitätsbedingung in Form einer Gleichung auf und bestimme eine Lösung dieser Gleichung. Kontrolliere mit dem Applet.
(b) Behalte jetzt die Koordinaten von $\vec{u}$ und $\vec{v}$ bei. Ziel ist es, die Koordinaten von $\vec{w}$ so abzuändern, dass $\vec{w}$ orthogonal zu $\vec{u}$ und orthogonal zu $\vec{v}$ ist. Stelle eine geeignete Orthogonalitätsbedingung in Form von zwei Gleichungen auf und bestimme eine Lösung dieses Gleichungssystems. Kontrolliere mit dem Applet.
(c) Es gibt viele verschiedene Quader, die man hier konstruieren kann. Entwickle selbst mindestens einen weiteren Quader und dokumentiere die Überlegungen und Rechnungen.
